1.2 value based RL
复习
- 在学习DQN之前,首先复习一些基础知识。在一局游戏中,把从起始到结束的所有奖励记作:\(R_1, \cdots, R_t, \cdots, R_n\)。
- 定义折扣率\(\gamma \in [0, 1]\)。折扣回报的定义是:
\(U_t = R_t + \gamma \cdot R_{t+1} + \gamma^2 \cdot R_{t+2} + \cdots + \gamma^{n-t} \cdot R_n\)。
- 在游戏尚未结束的\(t\)时刻,\(U_t\)是一个未知的随机变量,其随机性来自于\(t\)时刻之后的所有状态与动作。动作价值函数 的定义是:
\(Q_{\pi}(s_t, a_t) = \mathbb{E}[U_t | S_t = s_t, A_t = a_t]\),
- 公式中的期望消除了t tt 时刻之后的所有状态\(S_{t+1},\cdots,S_n\)与所有动作\(A_{t+1},\cdots,A_n\)
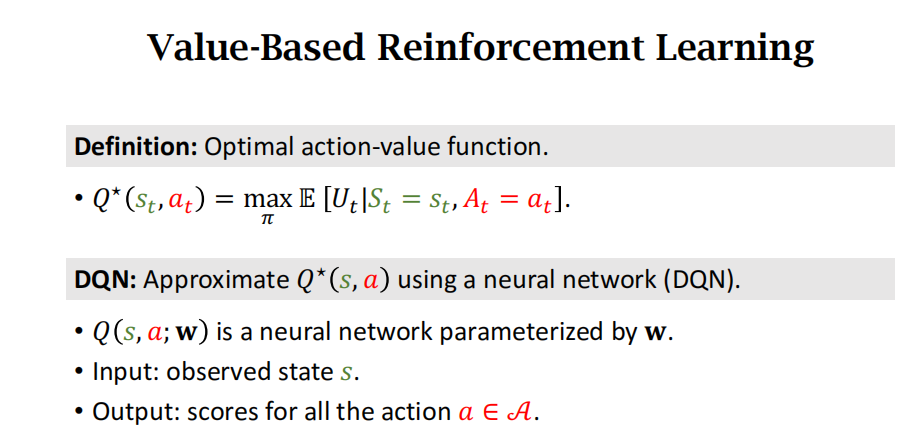
- 最优动作价值函数用最大化消除策略\(\pi\):\(Q^*(s_t, a_t) = \max_{\pi} Q_{\pi}(s_t, a_t), \forall s_t \in \mathcal{S}, a_t \in \mathcal{A}\)。
- 可以这样理解\(Q^*\): 已知\(s_t\)和\(a_t\), 不论未来采取什么样的策略\(\pi\), 回报\(U_t\)的期望不可能超过\(Q^*\)。
- 最优动作价值函数的用途:假如我们知道\(Q^*\), 我们就能用它做控制。
- 举个例子,超级玛丽游戏中的动作空间是\(A = \{左,右,上\}\)。
- 给定当前状态\(s_t\), 智能体该执行哪个动作呢?
- 假设我们已知\(Q^*\)函数,那么我们就让\(Q^*\)给三个动作打分,
- 比如:\(Q^*(s_t, 左) = 370, Q^*(s_t, 右) = -21, Q^*(s_t, 上) = 610\)。
- 这三个值是什么意思呢? 1.\(Q^*(s_t, 左) =
370\)的意思是:如果现在智能体选择向左走,不论之后采取什么策略\(\pi\), 那么回报\(U_t\)的期望最多不会超过 370。
- 同理,其他两个最优动作价值也是回报的期望的上界。
- 根据\(Q^*\)的评分,智能体应该选择向上跳,因为这样可以最大化回报\(U_t\)的期望。
DQN
- 我们希望知道\(Q^*\), 因为它就像是先知一般,可以预见未来,在\(t\)时刻就预见\(t\)到\(n\)时刻之间的累计奖励的期望。
- 假如我们有\(Q^*\)这位先知,我们就遵照先知的指导,最大化未来的累计奖励。
- 然而在实践中我们不知道\(Q^*\)的函数表达式。是否有可能近似出\(Q^*\)这位先知呢?
- 对于超级玛丽这样的游戏,学出来一个“先知”并不难。假如让我们重复玩超级玛丽一亿次,那我们就会像先知一样,看到当前状态,就能准确判断出当前最优的动作是什么。
- 这说明只要有足够多的“经验”, 就能训练出超级玛丽中的“先知”。

- 最优动作价值函数的近似:
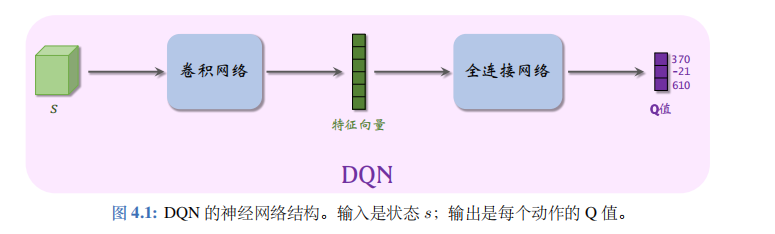
- 在实践中,近似学习“先知”\(Q^*\)最有效的办法是深度Q网络(deep Q network, 缩写 DQN), 记作\(Q(s, a; \boldsymbol{w})\), 其结构如图所述。
- 其中的\(\boldsymbol{w}\)表示神经网络中的参数。首先随机初始化\(\boldsymbol{w}\), 随后用“经验”去学习\(\boldsymbol{w}\)。
- 学习的目标是:对于所有的\(s\)和\(a\), DQN 的预测\(Q(s, a; \boldsymbol{w})\)尽量接近\(Q^*(s, a)\)。后面几节的内容都是如何学习\(\boldsymbol{w}\)!
- 可以这样理解 DQN 的表达式\(Q(s, a;
\boldsymbol{w})\)。
- DQN 的输出是离散动作空间\(A\)上的每个动作的 Q 值,即给每个动作的评分,分数越高意味着动作越好。
- 举个例子,动作空间是\(A = \{左,右,上\}\), 那么动作空间的大小等于\(|A| = 3\), 那么 DQN 的输出是 3 维的向量,记作\(\hat{q}\), 向量每个元素对应一个动作。
- 在图 4.1 中,DQN 的输出是 4.\(q^1 = Q(s, 左; \boldsymbol{w}) = 370, q^2 = Q(s, 右; \boldsymbol{w}) = -21, q^3 = Q(s, 上; \boldsymbol{w}) = 610\)。
- 总结一下,DQN 的输出是\(|A|\)维的向量\(\hat{q}\), 包含所有动作的价值。而我们常用的符号\(Q(s, a; \boldsymbol{w})\)是标量,是动作\(a\)对应的动作价值,是向量\(\hat{q}\)中的一个元素。
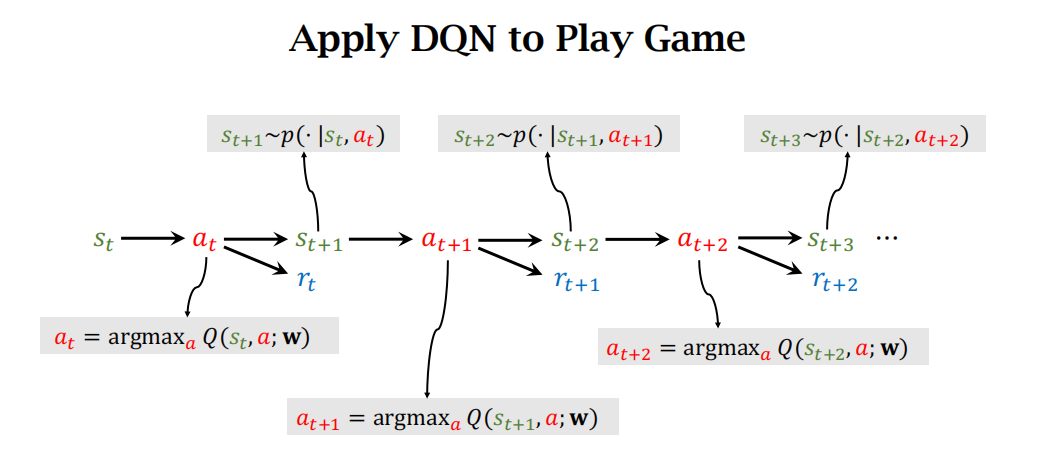
- 用DQN玩游戏:agent每次采取的action是使得Q函数取最大的那个动作,一直玩下去。下图的顺序是从左往右看。
- DQN 的梯度:在训练 DQN 的时候,需要对 DQN 关于神经网络参数\(\boldsymbol{w}\)求梯度。用\(\nabla_{w} Q(s, a; w) \triangleq \frac{\partial Q(s, a; w)}{\partial w}\)
- 表示函数值\(Q(s, a; \boldsymbol{w})\)关于参数\(\boldsymbol{w}\)的梯度。因为函数值\(Q(s, a; \boldsymbol{w})\)是一个实数,所以梯度的形状与\(\boldsymbol{w}\)完全相同。
- 如果\(\boldsymbol{w}\)是\(d \times 1\)的向量,那么梯度也是\(d \times 1\)的向量。如果\(\boldsymbol{w}\)是\(d_1 \times d_2\)的矩阵,那么梯度也是\(d_1 \times d_2\)的矩阵。如果\(\boldsymbol{w}\)是\(d_1 \times d_2 \times d_3\)的张量,那么梯度也是\(d_1 \times d_2 \times d_3\)的张量。
- 给定观测值\(s\)和\(a\), 比如\(a =
左\), 可以用反向传播计算出梯度\(\nabla_{\boldsymbol{w}}Q( s, 左;
\boldsymbol{w})\)。
- 在编程实现的时候,TensorFlow 和PyTorch 可以对 DQN 输出向量的一个元素(比如\(Q( s, 左; \boldsymbol{w})\)这个元素) 关于变量\(\boldsymbol{w}\)自动求梯度,得到的梯度的形状与\(\boldsymbol{w}\)完全相同。
时间差分(TD)算法
驾车时间预测的例子
- 假设我们有一个模型\(Q(s, d;
\boldsymbol{w})\), 其中\(s\)是起点,\(d\)是终点,\(\boldsymbol{w}\)是参数。
- 模型\(Q\)可以预测开车出行的时间开销。
- 这个模型一开始不准确,甚至是纯随机的。
- 但是随着很多人用这个模型,得到更多数据、更多训练,这个模型就会越来越准,会像谷歌地图一样准。
- 我们该如何训练这个模型呢?
- 在用户出发前,用户告诉模型起点\(s\)和终点\(d\), 模型做一个预测\(\hat{q} = Q(s, d; \boldsymbol{w})\)。
- 当用户结束行程的时候,把实际驾车时间\(y\)反馈给模型。
- 两者之差\(\hat{q} - y\)反映出模型是高估还是低估了驾驶时间,以此来修正模型,使得模型的估计更准确。
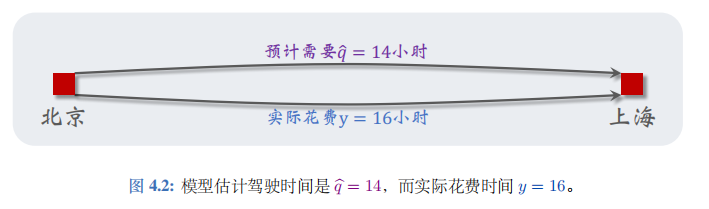
- 假设我是个用户,我要从北京驾车去上海。从北京出发之前,我让模型做预测,模型告诉我总车程是 14 小时:
\(\hat{q} \triangleq Q(“北京”, “上海”; \boldsymbol{w}) = 14\)。
- 当我到达上海,我知道自己花的实际时间是 16 小时,并将结果反馈给模型;见图 4.2。
- 可以用梯度下降对模型做一次更新,具体做法如下。把我的这次旅程作为一组训练数据:
\(s = “北京”, d = “上海”, \hat{q} = 14, y = 16\)。
- 我们希望估计值\(\hat{q} = Q(s, d; \boldsymbol{w})\)尽量接近真实观测到的\(y\), 所以用两者差的平方作为损失函数:
\(L(\boldsymbol{w}) = \frac{1}{2} [Q(s, d; \boldsymbol{w}) - y]^2\)。
- 用链式法则计算损失函数的梯度,得到:
\(\nabla_{\boldsymbol{w}}L(\boldsymbol{w}) = (\hat{q} - y) \cdot \nabla_{\boldsymbol{w}}Q(s, d; \boldsymbol{w})\)。
- 然后做一次梯度下降更新模型参数\(\boldsymbol{w}\):
\(\boldsymbol{w} \leftarrow \boldsymbol{w} - \alpha \cdot \nabla_{\boldsymbol{w}}L(\boldsymbol{w})\),
- 此处的\(\alpha\)是学习率,需要手动调整。在完成一次梯度下降之后,如果再让模型做一次预测,那么模型的预测值
\(Q("北京", "上海"; \boldsymbol{w})\)
- 会比原先更接近\(y = 16\)。
TD算法
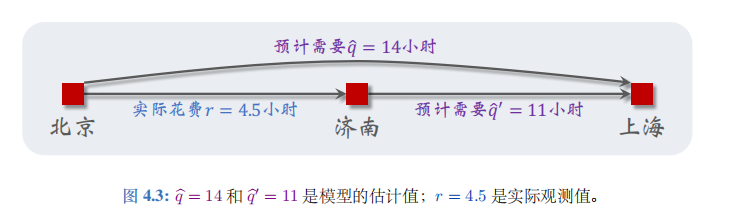
- 接着上文驾车时间的例子。出发前模型估计全程时间为\(\hat{q} = 14\)小时;模型建议的路线会途径济南。我从北京出发,过了\(r = 4.5\)小时,我到达济南。此时我再让模型做一次预测,模型告诉我
\(\hat{q}' \triangleq Q("济南", "上海"; \boldsymbol{w}) = 11\)。
- 见图 4.3
的描述。假如此时我的车坏了,必须要在济南修理,我不得不取消此次行程。
- 我没有完成旅途,那么我的这组数据是否能帮助训练模型呢?
- 其实是可以的,用到的算法叫做 时间差分 (temporal difference, 缩写 TD)。
- 下面解释 TD 算法的原理。
- 回顾一下我们已有的数据:模型估计从北京到上海一共需要\(\hat{q} = 14\)小时,我实际用了\(r = 4.5\)小时到达济南,模型估计还需要\(\tilde{q}' = 11\)小时从济南到上海。
- 到达济南时,根据模型最新估计,整个旅程的总时间为:
\(\hat{y} \triangleq r + \hat{q}' = 4.5 + 11 = 15.5\)。
- TD 算法将\(\hat{y} = 15.5\)称为
TD 目标 (TD target), 它比最初的预测\(\hat{q} = 14\)更可靠。
- 最初的预测\(\hat{q} = 14\)纯粹是估计的,没有任何事实的成分。
- TD 目标\(\hat{y} = 15.5\)也是个估计,但其中有事实的成分:其中的\(r = 4.5\)就是实际的观测。
- 基于以上讨论,我们认为 TD 目标\(\hat{y} =
15.5\)比模型最初的估计值\(Q(“北京”,
“上海”; \boldsymbol{w}) = 14\)更可靠,所以可以用\(\hat{y}\)对模型做“修正”。
- 我们希望估计值\(\hat{q} = Q(s, d;
\boldsymbol{w})\)尽量接近 TD 目标\(\hat{y}\),
所以用两者差的平方作为损失函数:
\(L(\boldsymbol{w}) = \frac{1}{2} [Q(“北京”, “上海”; \boldsymbol{w}) - \hat{y}]^2\)。
- 我们希望估计值\(\hat{q} = Q(s, d;
\boldsymbol{w})\)尽量接近 TD 目标\(\hat{y}\),
所以用两者差的平方作为损失函数:
- 此处把\(\hat{y}\)看做常数,尽管它依赖于\(\boldsymbol{w}\)。计算损失函数的梯度:
\(\nabla_{\boldsymbol{w}}L(\boldsymbol{w}) = (\hat{q} - \hat{y}) \cdot \nabla_{\boldsymbol{w}}Q(“北京”, “上海”; \boldsymbol{w})\),
- 此处的\(\delta = \hat{q} - \hat{y} = 14 -
15.5 = -1.5\)称作 TD 误差 (TD
error)。做一次梯度下降更新模型参数\(\boldsymbol{w}\):
\(\boldsymbol{w} \leftarrow \boldsymbol{w} - \alpha \cdot \delta \cdot \nabla_{\boldsymbol{w}}Q(“北京”, “上海”; \boldsymbol{w})\)。 - 如果你仍然不理解 TD 算法,那么请换个角度来思考问题。模型估计从北京到上海全程需要\(\hat{q} = 14\)小时,模型还估计从济南到上海需要\(\vec{q}' = 11\)小时。这就相当于模型做了这样的估计:从北京到济南需要的时间为\(\hat{q} - \hat{q}' = 14 - 11 = 3\)。
- 而我真实花费\(r = 4.5\)小时从北京到济南。模型的估计与我的真实观测之差为\(\delta = 3 - 4.5 = -1.5\)。这就是 TD 误差!以上分析说明 TD 误差\(\delta\)就是模型估计与真实观测之差。TD 算法的目的是通过更新参数\(\boldsymbol{w}\)使得损失\(L(\boldsymbol{w}) = \frac{1}{2} \delta^2\)减小。
用TD训练DQN
- TD算法是一种在线学习算法,可以逐步更新值函数,而不需要等到回合结束。
- 视频中用到的例子是从纽约到亚特兰大,途径华盛顿,但是道理都是一样的。
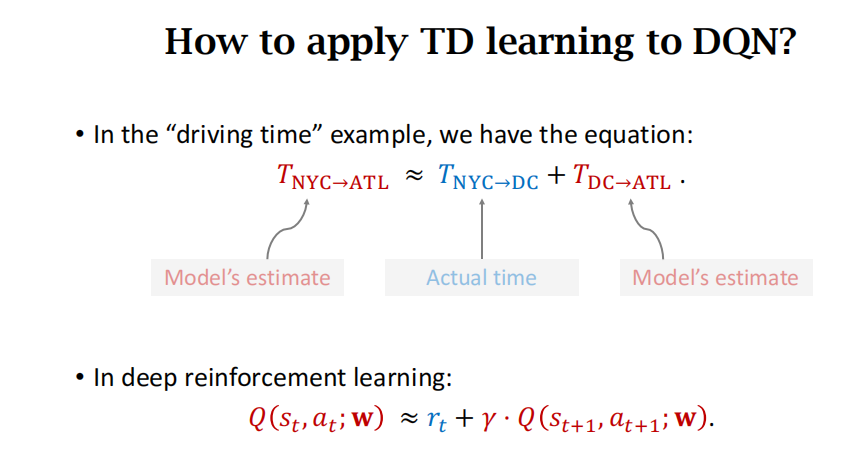
- 如何把TD算法用到DQN?和驾车的例子很像,等式左边是 t 时刻的 Q 的估计,等式右边是一个实际观测值加一项关于 t+1 时刻的 Q 估计。
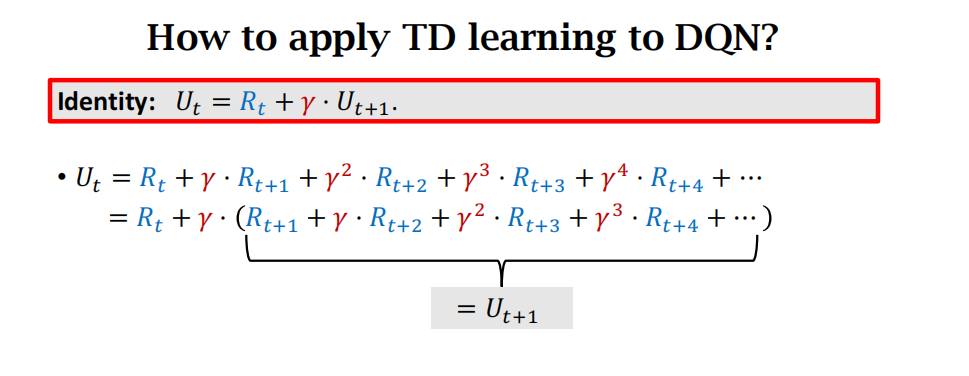
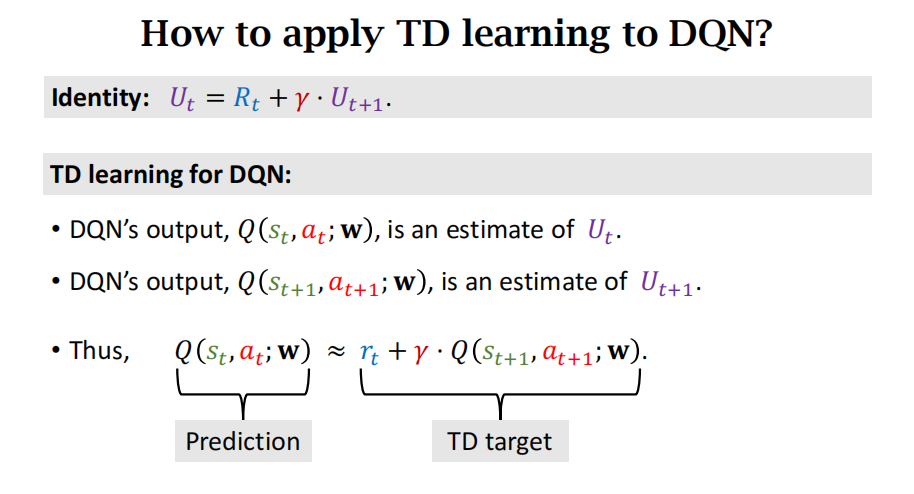
- 等式\(U_t = R_t + \gamma \cdot U_{t+1}\)
- 这个等式反映了相邻两个折扣回报之间的关系:t 时刻的折扣回报\(U_t\)等于 t 时刻的奖励\(R_t\)加上折扣因子\(\gamma\)乘以 t+1 时刻的折扣回报\(U_{t+1}\)。
- 得来的过程如下:
\(Q(s_t, a_t; \mathbf{w}) \approx \mathbb{E}[R_t + \gamma \cdot Q(S_{t+1}, A_{t+1}; \mathbf{w})]\)。这个公式两边是两个估计(estimate)
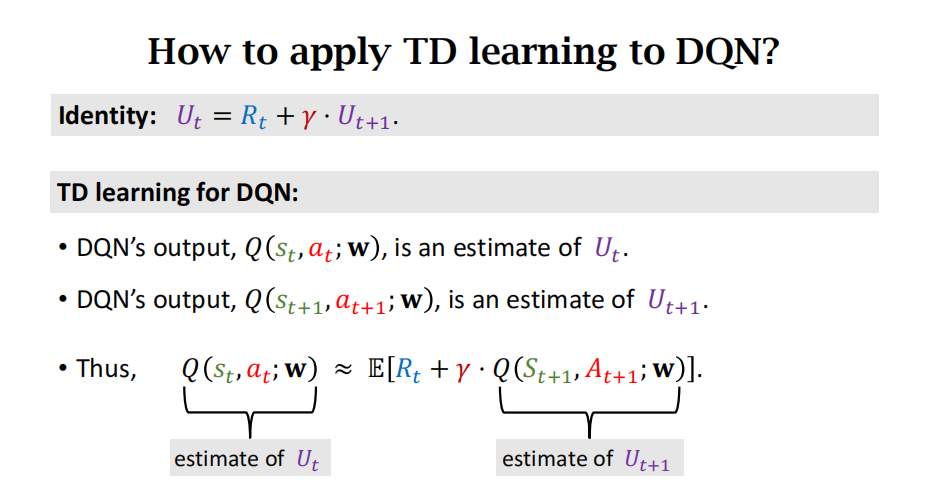
- 左边是 prediction,右边是 TD target。
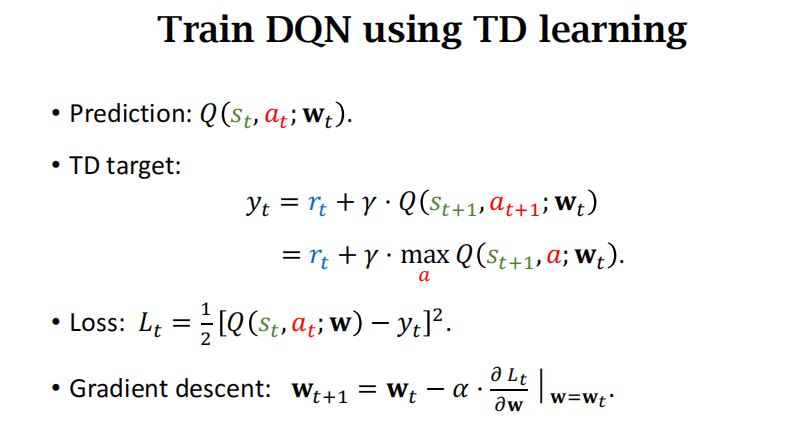
- 使用TD算法训练DQN的过程如下图:下图中的 t+1 时刻的 Q 为什么可以写成 max 的形式?是因为 t+1 时刻的 action\(a_{t+1}\)就是选择 t 时刻使得 Q 最大的那个 action。
- 下面是王树森书中具体的推导过程:
- 下面我们推导训练 DQN 的 TD 算法(严格地讲,此处推导的是“Q 学习算法”, 它属于 TD 算法的一种。本节就称其为 TD 算法)。回忆一下回报的定义\(U_t = \sum_{k=t}^n \gamma^{k-t} \cdot R_k\),\(U_{t+1} = \sum_{k=t+1}^n \gamma^{k-t-1} \cdot R_k\)。由\(U_t\)和\(U_{t+1}\)的定义可得:
\(U_t = R_t + \gamma \cdot \sum_{k=t+1}^n \gamma^{k-t-1} \cdot R_k = U_{t+1}\)。
- 回忆一下,最优动作价值函数可以写成
\(Q^*(s_t, a_t) = \max_{\pi} \mathbb{E} [U_t | S_t = s_t, A_t = a_t]\)。
- 从公式出发,经过一系列数学推导 , 可以得到下面的定理。这个定理是最优贝尔曼方程 (optimal Bellman equations) 的一种形式。
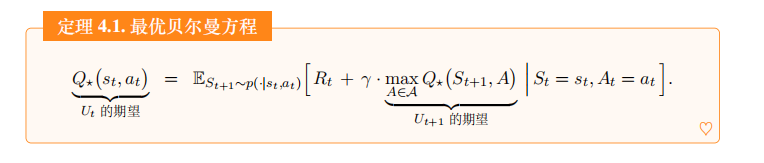
- 最优贝尔曼方程具体公式如下:
\(Q^*(s_t, a_t) = \mathbb{E}{S{t+1} \sim p(\cdot | s_t, a_t)} [R_t + \gamma \cdot \max_{A \in \mathcal{A}} Q^*(S_{t+1}, A) | S_t = s_t, A_t = a_t]\)。
- 贝尔曼方程的右边是个期望,我们可以对期望做蒙特卡洛近似。
- 当智能体执行动作\(a_t\)之后,环境通过状态转移函数\(p(s_{t+1} | s_t, a_t)\)计算出新状态\(s_{t+1}\)。奖励\(R_t\)最多只依赖于\(S_t\),\(A_t\),\(S_{t+1}\)。那么当我们观测到\(s_t\),\(a_t\),\(s_{t+1}\)时,则奖励\(R_t\)也被观测到,记作\(r_t\)。有了四元组\((s_t, a_t, r_t, s_{t+1})\),
- 我们可以计算出
\(r_t + \gamma \cdot \max_{a \in \mathcal{A}} Q^*(s_{t+1}, a)\)。
- 它可以看做是下面这项期望的蒙特卡洛近似:
\(\mathbb{E}_{S_{t+1} \sim p(\cdot | s_t, a_t)} [R_t + \gamma \cdot \max_{A \in \mathcal{A}} Q^*(S_{t+1}, A) | S_t = s_t, A_t = a_t]\)。
- 由定理和上述的蒙特卡洛近似可得:
\(Q^*(s_t, a_t) \approx r_t + \gamma \cdot \max_{a \in \mathcal{A}} Q^*(s_{t+1}, a)\)。
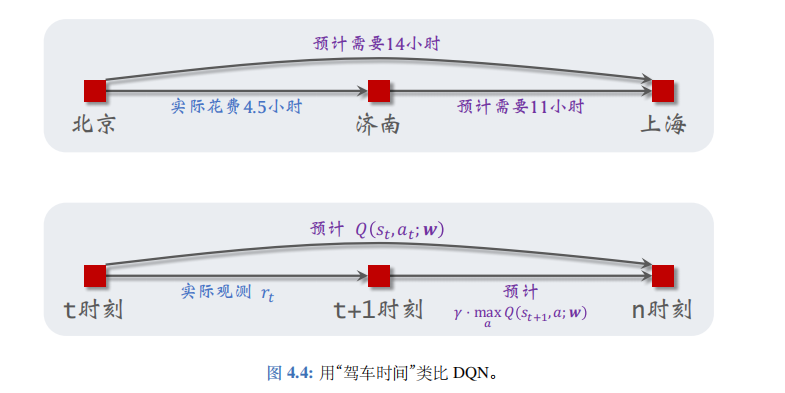
- 这是不是很像驾驶时间预测问题?左边的\(Q^*(s_t, a_t)\)就像是模型预测“北京到上海”的总时间,\(r_t\)像是实际观测的“北京到济南”的时间,\(\gamma \cdot \max_{a \in \mathcal{A}} Q^*(s_{t+1}, a)\)相当于模型预测剩余路程“济南到上海”的时间。见图 4.4 中的类比。
- 把公式中的最优动作价值函数\(Q^*(s,
a)\)替换成神经网络\(Q(s, a;
\boldsymbol{w})\), 得到:
\(Q(s_t, a_t; \boldsymbol{w}) \approx r_t + \gamma \cdot \max_{a \in \mathcal{A}} Q(s_{t+1}, a; \boldsymbol{w})\)。
- 左边的\(\hat{q}_t \triangleq Q(s_t, a_t; \boldsymbol{w})\)是神经网络在 t 时刻做出的预测,其中没有任何事实成分。右边的 TD 目标\(\hat{y}_t\)是神经网络在 t+1 时刻做出的预测,它部分基于真实观测到的奖励\(r_t\)。 +\(\hat{q}_t\)和\(\hat{y}_t\)两者都是对最优动作价值\(Q^*(s_t, a_t)\)的估计,但是\(\hat{y}_t\)部分基于事实,因此比\(\hat{q}_t\)更可信。应当鼓励\(\hat{q}_t \triangleq Q(s_t, a_t; \boldsymbol{w})\)接近\(\hat{y}_t\)。定义损失函数:
\(L(\boldsymbol{w}) = \frac{1}{2} [Q(s_t, a_t; \boldsymbol{w}) - \hat{y}_t]^2\)。
- 假装\(\hat{y}_t\)是常数(实际上\(\hat{y}_t\)依赖于\(\boldsymbol{w}\), 但是我们假装\(\hat{y}_t\)是常数), 计算\(L\)关于\(\boldsymbol{w}\)的梯度:
\(\nabla_{\boldsymbol{w}}L(\boldsymbol{w}) = (\hat{q}_t - \hat{y}_t) \cdot \nabla_{\boldsymbol{w}}Q(s_t, a_t; \boldsymbol{w})\)。 - 做一步梯度下降,可以让\(\hat{q}_t\)更接近\(\hat{y}_t\):
\(\boldsymbol{w} \leftarrow \boldsymbol{w} - \alpha \cdot \delta_t \cdot \nabla_{\boldsymbol{w}}Q(s_t, a_t; \boldsymbol{w})\)。 - 这个公式就是训练 DQN 的 TD 算法。
- 总结一下:最优行动价值函数是未知的,DQN算法就是用神经网络近似这个最优行动价值函数。
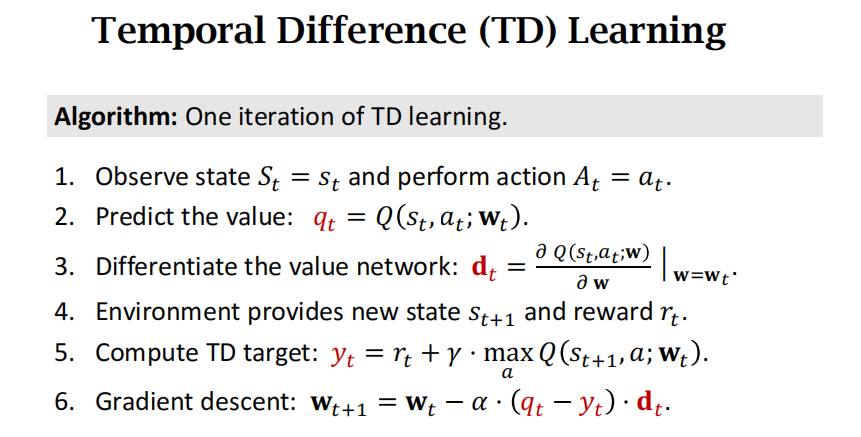
- TD算法具体流程如下:
- 书中介绍的训练流程
- 首先总结上面的结论。给定一个四元组\((s_t,
a_t, r_t, s_{t+1})\), 我们可以计算出 DQN 的预测值\(\hat{q}_t = Q(s_t, a_t; \boldsymbol{w})\),
以及 TD 目标和 TD 误差:
\(\hat{y}_t = r_t + \gamma \cdot \max_{a \in \mathcal{A}} Q(s_{t+1}, a; \boldsymbol{w})\)和\(\delta_t = \hat{q}_t - \hat{y}_t\)。 - TD 算法用这个公式更新 DQN 的参数:
\(\boldsymbol{w} \leftarrow \boldsymbol{w} - \alpha \cdot \delta_t \cdot \nabla_{\boldsymbol{w}}Q(s_t, a_t; \boldsymbol{w})\)。 - 注意,算法所需数据为四元组\((s_t, a_t, r_t, s_{t+1})\), 与控制智能体运动的策略\(\pi\)无关。这就意味着可以用任何策略控制智能体与环境交互,同时记录下算法运动轨迹,作为训练数据。因此,DQN 的训练可以分割成两个独立的部分:收集训练数据、更新参数\(\boldsymbol{w}\)。
- 收集训练数据:
- 我们可以用任何策略函数\(\pi\)去控制智能体与环境交互,这个\(\pi\)就叫做行为策略 (behavior
policy)。比较常用的是\(\epsilon\)-greedy 策略:
\(a_t = \left\{ \begin{array}{ll} \arg\max_a Q(s_t, a; \boldsymbol{w}), & \text{以概率 } (1 - \epsilon); \\ \text{均匀抽取 } A \text{ 中的一个动作}, & \text{以概率 } \epsilon. \end{array} \right.\) - 把智能体在一局游戏中的轨迹记作:
\(s_1, a_1, r_1, s_2, a_2, r_2, \cdots, s_n, a_n, r_n\)。 - 把一条轨迹划分成\(n\)个\((s_t, a_t, r_t, s_{t+1})\)这种四元组,存入数组,这个数组叫做经验回放数组 (replay buffer)。
- 更新 DQN 参数\(\boldsymbol{w}\):
- 随机从经验回放数组中取出一个四元组,记作\((s_j, a_j, r_j, s_{j+1})\)。
- 设 DQN 当前的参数为\(\boldsymbol{w}_{\text{now}}\),
执行下面的步骤对参数做一次更新,得到新的参数\(\boldsymbol{w}_{\text{new}}\)。
- 对 DQN 做正向传播,得到 Q 值:
\(\hat{q}_j = Q(s_j, a_j; \boldsymbol{w}_{\text{now}})\)和\(\hat{q}_{j+1} = \max_{a \in \mathcal{A}} Q(s_{j+1}, a; \boldsymbol{w}_{\text{now}})\)。 - 计算 TD 目标和 TD 误差:
\(\hat{y}_j = r_j + \gamma \cdot \hat{q}_{j+1}\)和\(\delta_j = \hat{q}_j - \hat{y}_j\)。 - 对 DQN 做反向传播,得到梯度:
\(\boldsymbol{g}_j = \nabla_{\boldsymbol{w}} Q(s_j, a_j; \boldsymbol{w}_{\text{now}})\)。 - 做梯度下降更新 DQN 的参数:
\(\boldsymbol{w}_{\text{new}} \leftarrow \boldsymbol{w}_{\text{now}} - \alpha \cdot \delta_j \cdot \boldsymbol{g}_j\)。
- 对 DQN 做正向传播,得到 Q 值:
智能体收集数据、更新 DQN 参数这两者可以同时进行。可以在智能体每执行一个动作之后,对\(\boldsymbol{w}\)做几次更新。也可以在每完成一局游戏之后,对 \(\boldsymbol{w}\) 做几次更新。
注意
上面介绍用 TD 算法训练 DQN, 更准确地说,我们用的 TD 算法叫做 Q 学习算法 (Q-learning)。TD 算法是一大类算法,常见的有 Q 学习和 SARSA。Q 学习的目的是学到最优动作价值函数 \(Q^*\), 而 SARSA 的目的是学习动作价值函数 \(Q_{\pi}\)。后面会介绍 SARSA 算法。