5.1 经验回放
价值学习高级技巧
前面介绍了 DQN, 并且用 Q学习算法训练 DQN。如果用最原始的 Q 学习算法,那么训练出的 DQN 效果会很不理想。想要提升 DQN 的表现,需要用本章的高级技巧。文献中已经有充分实验结果表明这些高级技巧对 DQN 非常有效,而且这些技巧不冲突,可以一起使用。有些技巧并不局限于DQN,而是可以应用于多种价值学习和策略学习方法。
介绍经验回放 (experience replay) 和优先经验回放(prioritized experience replay)。讨论 DQN 的高估问题以及解决方案——目标网络(target network) 和双 Q 学习算法(double Q-learning)。
介绍两种方法改进 DQN 的神经网络结构 (不是对 Q 学习算法的改进):对决网络 (dueling network),它把动作价值 (action value) 分解成状态价值(state value) 与优势 (advantage);噪声网络 (noisy net), 它往神经网络的参数中加入随机噪声,鼓励探索。
经验回放
经验回放(experience replay)是强化学习中一个重要的技巧,可以大幅提升强化学习的表现。经验回放的意思是把智能体与环境交互的记录 (即经验) 储存到一个数组里,事后反复利用这些经验训练智能体。这个数组被称为经验回放数组 (replay buffer)。
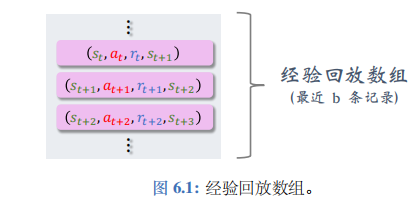
具体来说,把智能体的轨迹划分成\(s_t, a_t, r_t, s_{t+1}\)这样的四元组,存入一个数组。需要人为指定数组的大小 (记作\(b\))。数组中只保留最近\(b\)条数据;当数组存满之后,删除掉最旧的数据。数组的大小\(b\)是个需要调的超参数,会影响训练的结果。通常设置\(b\)为\(10^5\sim10^6\)。
在实践中,要等回放数组中有足够多的四元组时,才开始做经验回放更新 DQN。根据论文的实验分析,如果将 DQN 用于 Atari 游戏,最好是在收集到 20 万条四元组时才开始做经验回放更新 DQN; 如果是用更好的 Rainbow DQN, 收集到 8 万条四元组时就可以开始更新 DQN。在回放数组中的四元组数量不够的时候,DQN 只与环境交互,而不去更新 DQN 参数,否则实验效果不好。
经验回放的优点
经验回放的一个好处在于打破序列的相关性。训练 DQN 的时候,每次我们用一个四元组对 DQN 的参数做一次更新。我们希望相邻两次使用的四元组是独立的。然而当智能体收集经验的时候,相邻两个四元组\((s_t, a_t, r_t, s_{t+1})\)和\((s_{t+1}, a_{t+1}, r_{t+1}, s_{t+2})\)有很强的相关性。依次使用这些强关联的四元组训练 DQN, 效果往往会很差。经验回放每次从数组里随机抽取一个四元组,用来对 DQN 参数做一次更新。这样随机抽到的四元组都是独立的,消除了相关性。
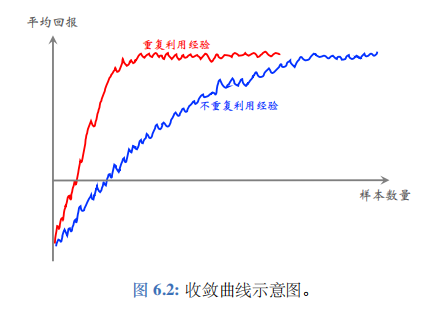
经验回放的另一个好处是重复利用收集到的经验、而不是用一次就丢弃,这样可以用更少的样本数量达到同样的表现。重复利用经验、不重复利用经验的收敛曲线通常如图 6.2 所示。图的横轴是样本数量,纵轴是平均回报。
注 在阅读文献的时候请注意“样本数量"(sample complexity) 与“更新次数"两者的区别。样本数量是指智能体从环境中获取的奖励\(r\)的数量。而一次更新的意思是从经验回放数组里取出一个或多个四元组,用它对参数\(w\)做一次更新。通常来说,样本数量更重要,因为在实际应用中收集经验比较困难。比如,在机器人的应用中,需要在现实世界做一次实验才能收集到一条经验,花费的时间和金钱远大于做一次计算。相对而言,做更新的次数不是那么重要,更新次数只会影响训练时的计算量而已。
经验回放的局限性
需要注意,并非所有的强化学习方法都允许重复使用过去的经验。经验回放数组里的数据全都是用行为策略 (behavior policy) 控制智能体收集到的。在收集经验同时,我们也在不断地改进策略。策略的变化导致收集经验时用的行为策略是过时的策略,不同于当前我们想要更新的策略——即目标策略(target policy)。也就是说,经验回放数组中的经验通常是过时的行为策略收集的,而我们真正想要学的目标策略不同于过时的行为策略。
有些强化学习方法允许行为策略不同于目标策略。这样的强化学习方法叫做异策略(off-policy)。比如 Q 学习、确定策略梯度 (DPG) 都属于异策略。由于它们允许行为策略不同于目标策略,过时的行为策略收集到的经验可以被重复利用。经验回放适用于异策略。
有些强化学习方法要求行为策略与目标策略必须相同。这样的强化学习方法叫做同策略 (on-policy)。比如 SARSA、REINFORCE、A2C 都属于同策略。它们要求经验必须是当前的目标策略收集到的,而不能使用过时的经验。经验回放不适用于同策略。
优先经验回放
优先经验回放 (prioritized experience replay) 是一种特殊的经验回放方法,它比普通的经验回放效果更好:既能让收敛更快,也能让收敛时的平均回报更高。经验回放数组里有\(b\)个四元组,普通经验回放每次均匀抽样得到一个样本——即四元组\((s_j, a_j, r_j, s_{j+1})\)。用它来更新 DQN 的参数。优先经验回放给每个四元组一个权重,然后根据权重做非均匀随机抽样。如果 DQN 对\((s_j, a_j)\)的价值判断不准确,即\(Q(s_j, a_j; w)\)离\(Q^*(s_j, a_j)\)较远,则四元组\((s_j, a_j, r_j, s_{j+1})\)应当有较高的权重。
为什么样本的重要性会有所不同呢?设想你用强化学习训练一辆无人车。经验回放数组中的样本绝大多数都是车辆正常行驶的情形,只有极少数样本是意外情况,比如旁边车辆强行变道、行人横穿马路、警察封路要求绕行。数组中的样本的重要性显然是不同的。绝大多数的样本都是车辆正常行驶,而且正常行驶的情形很容易处理,出错的可能性非常小。意外情况的样本非常少,但是又极其重要,处理不好就会车毁人亡。所以意外情况的样本应当有更高的权重,受到更多关注。这两种样本不应该同等对待。
如何自动判断哪些样本更重要呢?举个例子,自动驾驶中的意外情况数量少、而且难以处理,导致 DQN 的预测\(Q(s_j, a_j; w)\)严重偏离真实价值\(Q^*(s_j, a_j)\)。因此,要是\(|Q(s_j, a_j; w) - Q^*(s_j, a_j)|\)较大,则应该给样本\((s_j, a_j, r_j, s_{j+1})\)较高的权重。然而实际上我们不知道\(Q^*\),因此无从得知\(|Q(s_j, a_j; w) - Q^*(s_j, a_j)|\)。不妨把它替换成 TD 误差。回忆一下,TD 误差的定义是:
\(\delta_j = \Delta Q(s_j, a_j; w_{\text{now}}) - [r_t + \gamma \cdot \max_a Q(s_{j+1}, a; w_{\text{now}})]\)
如果 TD 误差的绝对值\(|\delta_j|\)大,说明 DQN 对\((s_j, a_j)\)的真实价值的评估不准确,那么应该给\((s_j, a_j, r_j, s_{j+1})\)设置较高的权重。
优先经验回放对数组里的样本做非均匀抽样。四元组\((s_j, a_j, r_j, s_{j+1})\)的权重是 TD 误差的绝对值\(|\delta_j|\)。有两种方法设置抽样概率。一种抽样概率是:
\(p_j \propto |\delta_j| + \epsilon\).
此处的\(\epsilon\)是个很小的数,防止抽样概率接近零,用于保证所有样本都以非零的概率被抽到。另一种抽样方式先对\(|\delta_j|\)做降序排列,然后计算
\(p_j \propto \frac{1}{\text{rank}(j)}\).
此处的\(\text{rank}(j)\)是\(|\delta_j|\)的序号。大的\(|\delta_j|\)的序号小,小的\(|\delta_j|\)的序号大。两种方式的原理是一样的,\(|\delta_j|\)大的样本被抽样到的概率大。
优先经验回放做非均匀抽样,四元组\((s_j, a_j, r_j, s_{j+1})\)被抽到的概率是\(p_j\)。抽样是非均匀的,不同的样本有不同的抽样概率,这样会导致 DQN 的预测有偏差。应该相应调整学习率,抵消掉不同抽样概率造成的偏差。TD 算法用“随机梯度下降”来更新参数:
\(w_{\text{new}} \leftarrow w_{\text{now}} - \alpha \cdot g\),
此处的\(\alpha\)是学习率,\(g\)是损失函数关于\(w\)的梯度。如果用均匀抽样,那么所有样本有相同的学习率\(\alpha\)。如果做非均匀抽样的话,应该根据抽样概率来调整学习率\(\alpha\)。如果一条样本被抽样的概率大,那么它的学习率就应该比较小。可以这样设置学习率:
\(\alpha_j = \frac{\alpha}{(b \cdot p_j)^\beta}\),
此处的\(b\)是经验回放数组中样本的总数,\(\beta \in (0, 1)\)是个需要调的超参数(论文里建议一开始让\(\beta\)比较小,最终增长到 1)。
注 均匀抽样是一种特例,即所有抽样概率都相等:
\(p_1 = \cdots = p_b = \frac{1}{b}\).
在这种情况下,有\((b \cdot p_j)^\beta = 1\), 因此学习率都相同:
\(\alpha_1 = \cdots = \alpha_b = \alpha_o\).
注 读者可能会问下面的问题。如果样本\((s_j, a_j, r_j, s_{j+1})\)很重要,它被抽到的概率\(p_j\)很大,可是它的学习率却很小。当\(\beta = 1\)时,如果抽样概率\(p_j\)变大 10 倍,则学习率\(\alpha_j\)减小 10 倍。抽样概率、学习率两者岂不是抵消了吗,那么优先经验回放有什么意义呢?大抽样概率、小学习率两者其实并没有抵消,因为下面两种方式并不等价:
- 设置学习率为\(\alpha\),使用样本\((s_j, a_j, r_j, s_{j+1})\)计算一次梯度,更新一次参数\(w\);
- 设置学习率为\(\frac{\alpha}{10}\), 使用样本\((s_j, a_j, r_j, s_{j+1})\)计算十次梯度,更新十次参数\(w\)。
乍看起来两种方式区别不大,但其实第二种方式是对样本更有效的利用。第二种方式的缺点在于计算量大了十倍,所以第二种方式只被用于重要的样本。
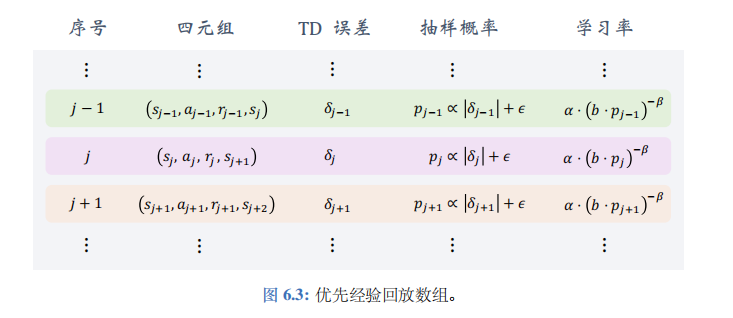
优先经验回放数组如图 6.3 所示。设\(b\)为数组大小,需要手动调整。如果样本 (即四元组) 的数量超过了\(b\),那么要删除最旧的样本。数组里记录了四元组、TD 误差、抽样概率、以及学习率。注意,数组里存的 TD 误差\(\delta_j\)是用很多步之前过时的 DQN 参数计算出来的:
\(\delta_j = Q(s_j, a_j; w_{\text{old}}) - [r_t + \gamma \cdot \max_a Q(s_{j+1}, a; w_{\text{old}})]\).
做经验回放的时候,每次取出一个四元组,用它计算出新的 TD 误差:
\(\delta_j' = Q(s_j, a_j; w_{\text{now}}) - [r_t + \gamma \cdot \max_a Q(s_{j+1}, a; w_{\text{now}})]\),
然后用它更新 DQN 的参数。用这个新的\(\delta_j'\)取代数组中旧的\(\delta_j\)。