7.1 连续控制
连续控制
前面的内容全部都是离散控制,即动作空间是一个离散的集合,比如超级玛丽游戏中的动作空间\(A=\{左,右,上\}\)是个离散集合。本章的内容是连续控制,即动作空间是个连续集合,比如汽车的转向\(A=[-40^{\circ},40^{\circ}]\)就是连续集合。如果把连续动作空间做离散化,那么离散控制的方法就能直接解决连续控制问题;先讨论连续集合的离散化。然而更好的办法是直接用连续控制方法,而非离散化之后借用离散控制方法。本章介绍两种连续控制方法:确定策略网络和随机策略网络。
ChatGPT对DPG的解释:
确定性策略梯度(Deterministic Policy Gradient,DPG)是强化学习中一种用于训练确定性策略的方法。与传统的随机策略不同,确定性策略直接映射状态到具体的动作,而不是输出一个动作的概率分布。DPG 主要应用于连续动作空间的问题,其中动作是实数空间中的连续值。
下面是 DPG 的基本思想和主要要素:
- 确定性策略: 在 DPG 中,智能体的策略是确定性的,即给定一个状态,它直接输出一个具体的动作。这样的确定性策略可以表示为 (\(a = \mu(s)\)),其中 (\(\mu\)) 是策略函数,输入为状态 (s),输出为动作 (a)。
- 值函数: DPG 使用值函数来评估策略的好坏。通常,包括状态值函数(State Value Function)和动作值函数(Action Value Function)。其中,状态值函数表示在给定状态下的期望累积回报,动作值函数表示在给定状态和动作的情况下的期望累积回报。
- 策略梯度: DPG 使用策略梯度方法来更新策略参数。策略梯度是关于策略参数的梯度,它告诉我们如何调整策略以最大化期望累积回报。在 DPG 中,通过对值函数对动作的梯度来计算策略梯度。
- Actor-Critic 结构: DPG 通常采用 Actor-Critic 结构,其中包括一个 Actor 网络负责输出动作,一个 Critic 网络负责估计值函数。这两个网络共同工作,Actor 的参数通过 Critic 的估计值函数的梯度进行更新。
总体来说,DPG 的训练过程涉及通过策略梯度来调整 Actor 网络的参数,以最大化 Critic 网络估计的值函数。这样,DPG 可以在连续动作空间中有效地训练确定性策略。
离散控制与连续控制的区别
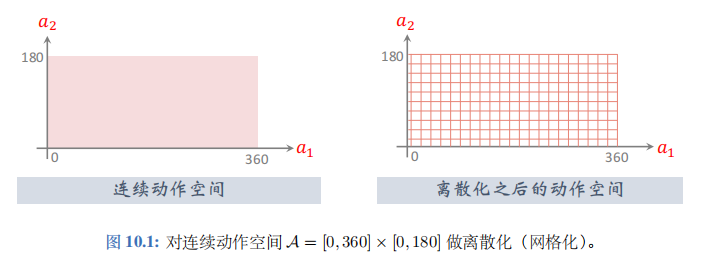
考虑这样一个问题:我们需要控制一只机械手臂,完成某些任务,获取奖励。机械手臂有两个关节,分别可以在\([0^{\circ},360^{\circ}]\)与\([0^{\circ},180^{\circ}]\)的范围内转动。这个问题的自由度是\(d=2\), 动作是二维向量,动作空间是连续集合\(A=[0,360] \times [0,180]\)。
此前我们学过的强化学习方法全部都是针对离散动作空间,不能直接解决上述连续控制问题。想把此前学过的离散控制方法应用到连续控制上,必须要对连续动作空间做离散化 (网格化)。比如把连续集合\(A=[0,360] \times [0,180]\)变成离散集合\(\{0,20,40,\cdots,360\} \times \{0,20,40,\cdots,180\}\); 见图 10.1。
对动作空间做离散化之后,就可以应用之前学过的方法训练 DQN 或者策略网络,用于控制机械手臂。可是用离散化解决连续控制问题有个缺点。把自由度记作\(d\)。自由度\(d\)越大,网格上的点就越多,而且数量随着\(d\)指数增长,会造成维度灾难。动作空间的大小即网格上点的数量。如果动作空间太大,DQN 和策略网络的训练都变得很困难,强化学习的结果会不好。上述离散化方法只适用于自由度\(d\)很小的情况;如果\(d\)不是很小,就应该使用连续控制方法。后面两节介绍两种连续控制的方法。