12. 强化学习
- 强化学习应用
- 两个应用
- 强化学习常用什么过程描述
- 马尔科夫性是什么
- 强化学习问题基本设置
- 机器所处环境E
- 状态空间:是机器感知到的环境的描述
- 机器能采取的行为空间A
- 策略(policy)π:X→A(或π:X×A→R)
- 潜在的状态转移(概率)函数P:X×X×A→R
- 潜在的奖赏(reward)函数R:X×X×A→R或R:X×X→R
- 强化学习对应四元组
- E=<X,A,P,R>
- 目标
- 机器通过在环境中不断尝试从而学到一个策略π,使得长期执行该策略后得到的累积奖赏最大
- 强化学习vs监督学习
- 监督学习:给有标记样本
- 强化学习:没有标记样本,通过执行动作之后反馈的奖赏来学习,强化学习在某种意义上可以认为是具有“延迟标记信息”的监督学习
- K-摇臂赌博机
- 特点
- 只有一个状态,K个动作
- 每个摇臂的奖赏服从某个期望未知的分布
- 执行有限次动作
- 最大化累积奖赏
- 探索-利用(Exploration-Exploitation)
- 探索:估计不同摇臂的优劣(奖赏期望的大小)
- 利用:选择当前最优的摇臂
- 在探索与利用之间进行折中
- e-贪心
- 以e的概率探索:均匀随机选择一个摇臂
- 以1-e的概率利用:选择当前平均奖赏最高的摇臂
- Softmax
- e-贪心
- 特点
- 有模型学习(model-basedlearning)
- E=<X,A,P,R>
- X,A,P,R均已知
- 方便起见,假设状态空间和动作空间均有限
- 强化学习的目标:找到使累积奖赏最大的策略π
- 策略评估:使用某策略所带来的累积奖赏
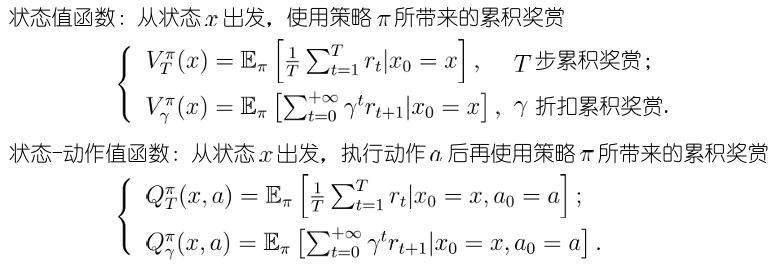
- 给定π,值函数的计算:值函数具有简单的递归形式
- Bellman等式
- 状态-动作值函数与状态值函数可以相互计算
- 贝尔曼方程
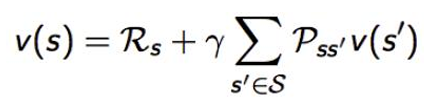
- 当前状态与下一状态价值函数之间的递归关系
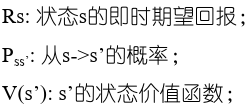
- 策略评估
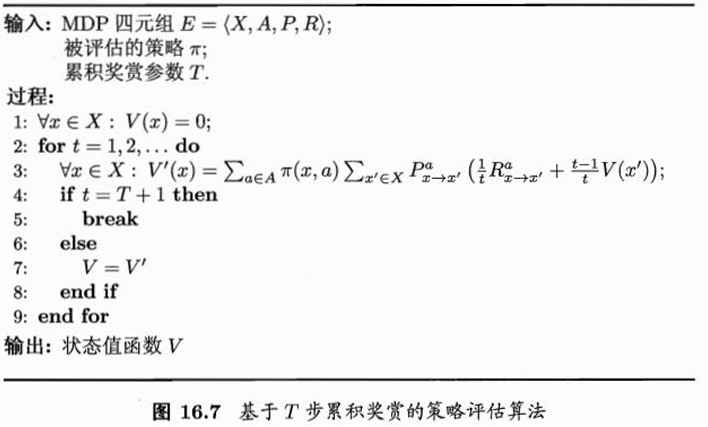
- 在模型已知时,对任意策略估计出有该策略带来的期望累积奖励——策略评估
- 策略评估:使用某策略所带来的期望累积奖赏;
- 策略改进:将非最优策略改进为最优策略
- 非最优策略的改进方式:将策略选择的动作改为当前最优的动作
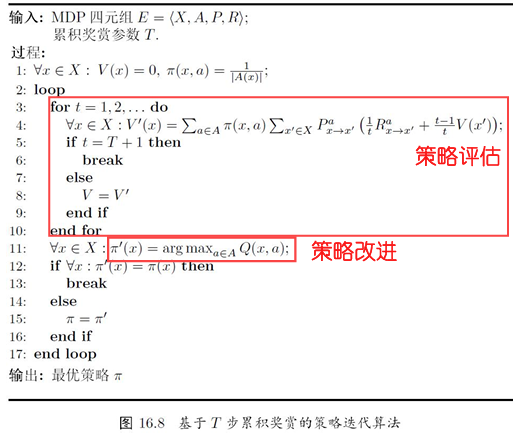
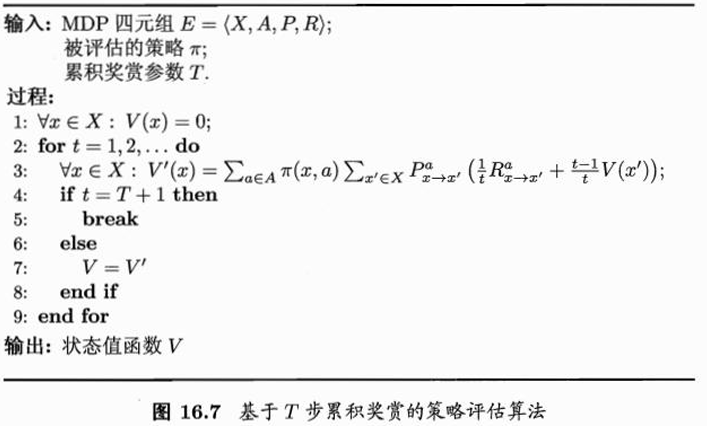
- 策略迭代(policyiteration):求解最优策略的方法
- 随机策略作为初始策略策略评估+策略改进+策略评估+策略改进+……直到策略收敛
- 策略迭代算法的缺点:每次改进策略后都要重新评估策略,导致耗时
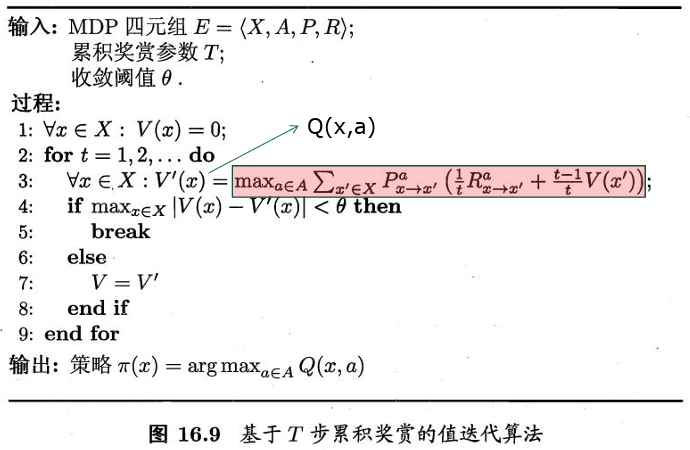
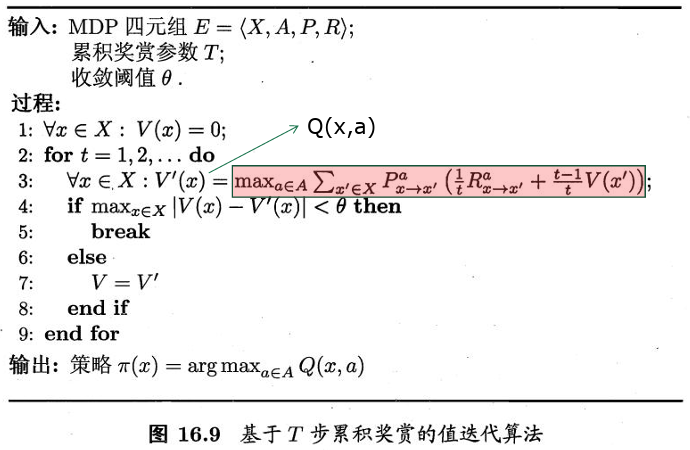
- 值迭代
- 有模型学习小结
- 强化学习任务可归结为基于动态规划的寻优问题
- 与监督学习不同,这里并未涉及到泛化能力,而是为每一个状态找到最好的动作
- E=<X,A,P,R>
- 免模型学习(model-freelearning):更加符合实际情况
- 情况
- 转移概率,奖赏函数未知
- 甚至环境中的状态数目也未知
- 假定状态空间有限
- 免模型学习所面临的困难
- 策略无法评估
- 无法通过状态值函数计算状态-动作值函数
- 机器只能从一个起始状态开始探索环境
- 解决困难的办法
- 多次采样
- 直接估计每一对状态-动作的值函数
- 在探索过程中逐渐发现各个状态
- 蒙特卡罗强化学习:采样轨迹,用样本均值近似期望
- 策略评估:蒙特卡罗法
- 从某状态出发,执行某策略
- 对轨迹中出现的每对状态-动作,记录其后的奖赏之和
- 采样多条轨迹,每个状态-动作对的累积奖赏取平均

- 策略改进:换入当前最优动作
- 蒙特卡罗强化学习可能遇到的问题:轨迹的单一性
- 解决问题的办法

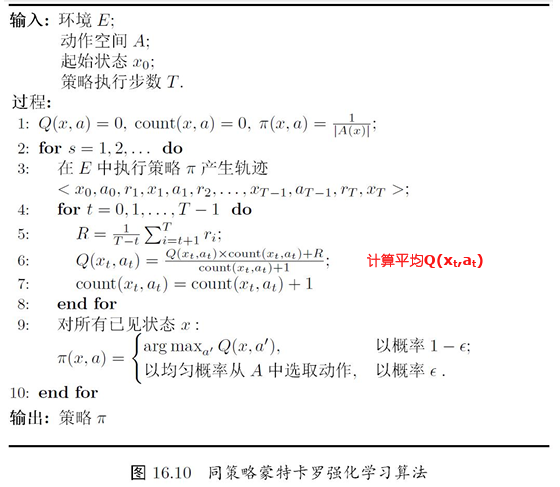
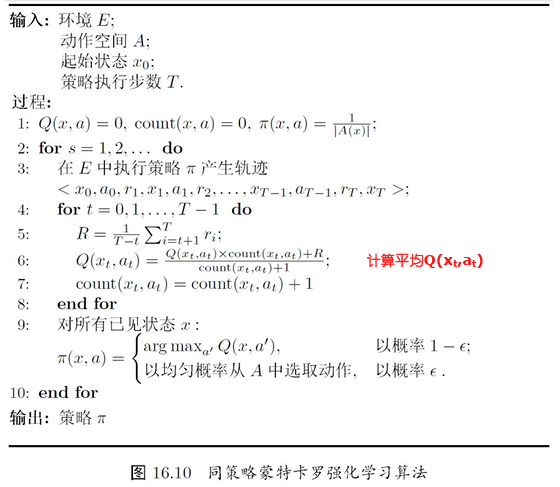
- 同策略蒙特卡罗强化学习算法
- 异策略蒙特卡罗强化学习算法
- 解决问题的办法
- 蒙特卡罗强化学习的缺点:低效
- 求平均时以“批处理式”进行
- 在一个完整的采样轨迹完成后才对状态-动作值函数进行更新
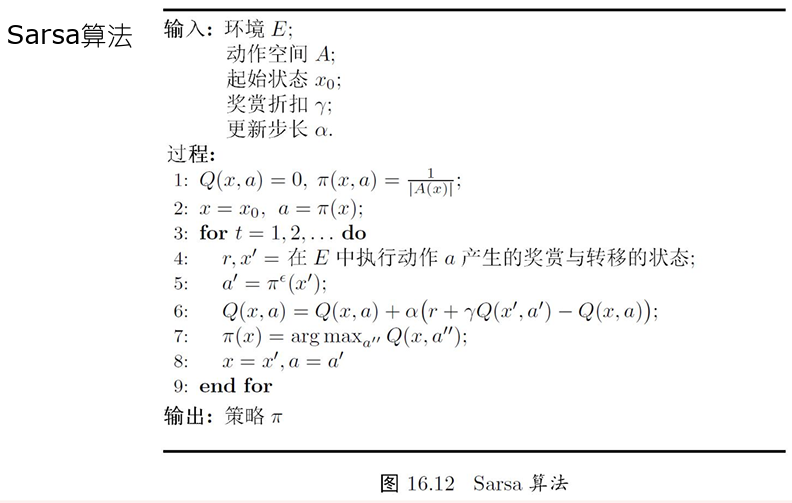
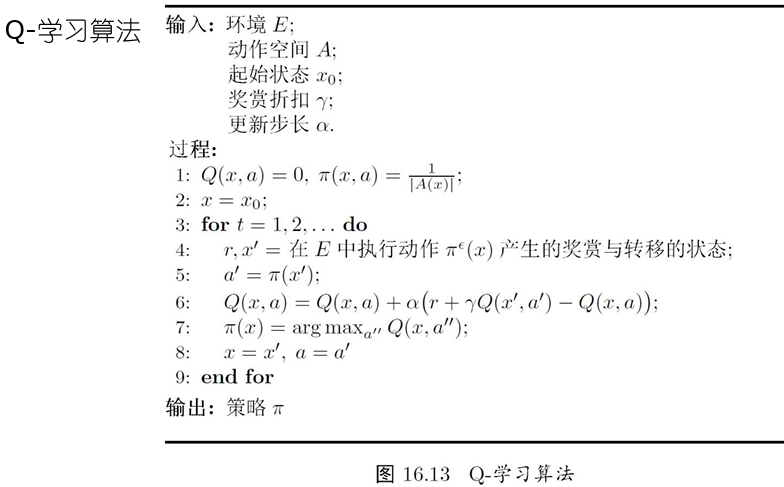
- 克服缺点的办法:时序差分(temporaldifference,TD)学习
- 策略评估:蒙特卡罗法
- 时序差分学习
- 情况
- 深度强化学习
- AlphaGo
- 强化学习应用
- AlphaGo
- 体彩世界杯
- 强化学习常用马尔可夫决策过程(MDP,MarkovDecisionProcess)描述
- 马尔科夫性:当前时刻的状态仅与前一时刻的状态和动作有关,与其他时刻的状态和动作条件独立
- 强化学习问题基本设置
- 机器所处环境E
- 例如在种西瓜任务中,环境是西瓜生长的自然世界
- 状态空间:是机器感知到的环境的描述
- 瓜苗长势的描述
- 机器能采取的行为空间A
- 浇水施肥等
- 策略(policy)π:X→A(或π:X×A→R)
- 根据瓜苗状态是缺水时,返回动作浇水
- 潜在的状态转移(概率)函数P:X×X×A→R
- 瓜苗当前状态缺水,选择动作浇水,有一定概率恢复健康,也有一定概率无法恢复
- 从一个状态到下一个状态的转移,要么为确定性转移过程,要么随机性转移过程
- 潜在的奖赏(reward)函数R:X×X×A→R或R:X×X→R
- 瓜苗健康对应奖赏+1,瓜苗凋零对应奖赏-10
- 强化学习对应四元组
- E=<X,A,P,R>
- 目标
- 机器通过在环境中不断尝试从而学到一个策略π,使得长期执行该策略后得到的累积奖赏最大
- 机器所处环境E
- 强化学习vs监督学习
- 监督学习:给有标记样本
- 强化学习:没有标记样本,通过执行动作之后反馈的奖赏来学习,强化学习在某种意义上可以认为是具有“延迟标记信息”的监督学习
- K-摇臂赌博机
- 特点
- 只有一个状态,K个动作
- 每个摇臂的奖赏服从某个期望未知的分布
- 执行有限次动作
- 最大化累积奖赏
- 探索-利用(Exploration-Exploitation)
- 探索:估计不同摇臂的优劣(奖赏期望的大小)
- 利用:选择当前最优的摇臂
- 在探索与利用之间进行折中
- e-贪心
- 以e的概率探索:均匀随机选择一个摇臂
- 以1-e的概率利用:选择当前平均奖赏最高的摇臂
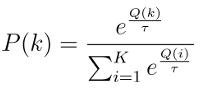
- Softmax
- 基于当前已知的摇臂平均奖赏来对探索与利用折中
- 若某个摇臂当前的平均奖赏越大,则它被选择的概率越高,概率分配使用Boltzmann分布:
- 两种算法都有一个折中参数
 ,算法性能孰好孰坏取决于具体应用问题
,算法性能孰好孰坏取决于具体应用问题
- e-贪心
- 特点
- 有模型学习(model-basedlearning)
- E=<X,A,P,R>
- X,A,P,R均已知
- 方便起见,假设状态空间和动作空间均有限
- 强化学习的目标:找到使累积奖赏最大的策略π
- 策略评估:使用某策略所带来的累积奖赏
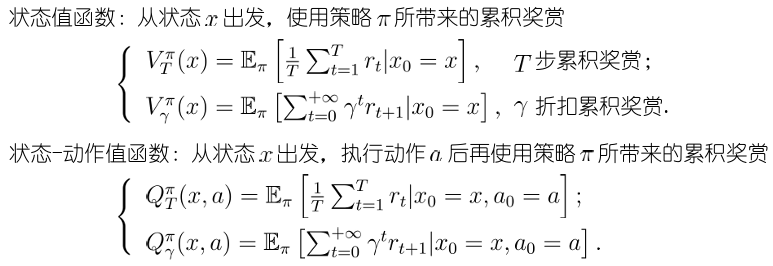
- 给定π,值函数的计算:值函数具有简单的递归形式
- Bellman等式
- 状态-动作值函数与状态值函数可以相互计算
- 贝尔曼方程
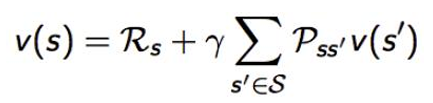
- 当前状态与下一状态价值函数之间的递归关系
- 策略评估
- 在模型已知时,对任意策略估计出有该策略带来的期望累积奖励——策略评估
- 策略评估:使用某策略所带来的期望累积奖赏;
- 策略改进:将非最优策略改进为最优策略
- 非最优策略的改进方式:将策略选择的动作改为当前最优的动作
- 策略迭代(policyiteration):求解最优策略的方法
- 随机策略作为初始策略策略评估+策略改进+策略评估+策略改进+……直到策略收敛
- 策略迭代算法的缺点:每次改进策略后都要重新评估策略,导致耗时
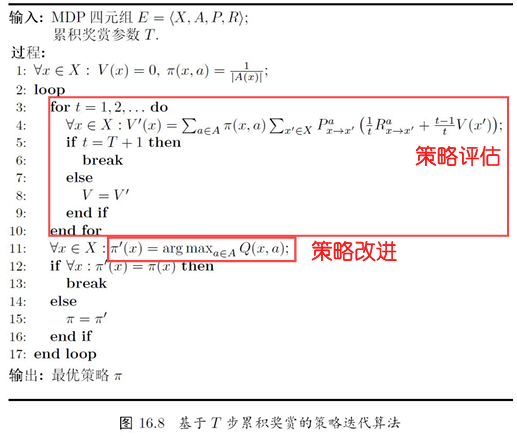
- 值迭代
- 有模型学习小结
- 强化学习任务可归结为基于动态规划的寻优问题
- 与监督学习不同,这里并未涉及到泛化能力,而是为每一个状态找到最好的动作
- E=<X,A,P,R>
- 免模型学习(model-freelearning):更加符合实际情况
- 情况
- 转移概率,奖赏函数未知
- 甚至环境中的状态数目也未知
- 假定状态空间有限
- 免模型学习所面临的困难
- 策略无法评估
- 无法通过状态值函数计算状态-动作值函数
- 机器只能从一个起始状态开始探索环境
- 解决困难的办法
- 多次采样
- 直接估计每一对状态-动作的值函数
- 在探索过程中逐渐发现各个状态
- 蒙特卡罗强化学习:采样轨迹,用样本均值近似期望
- 策略评估:蒙特卡罗法
- 从某状态出发,执行某策略
- 对轨迹中出现的每对状态-动作,记录其后的奖赏之和
- 采样多条轨迹,每个状态-动作对的累积奖赏取平均

- 策略改进:换入当前最优动作
- 蒙特卡罗强化学习可能遇到的问题:轨迹的单一性
- 解决问题的办法

- 同策略蒙特卡罗强化学习算法
- 异策略蒙特卡罗强化学习算法
- 解决问题的办法
- 蒙特卡罗强化学习的缺点:低效
- 求平均时以“批处理式”进行
- 在一个完整的采样轨迹完成后才对状态-动作值函数进行更新
- 克服缺点的办法:时序差分(temporaldifference,TD)学习
- 策略评估:蒙特卡罗法
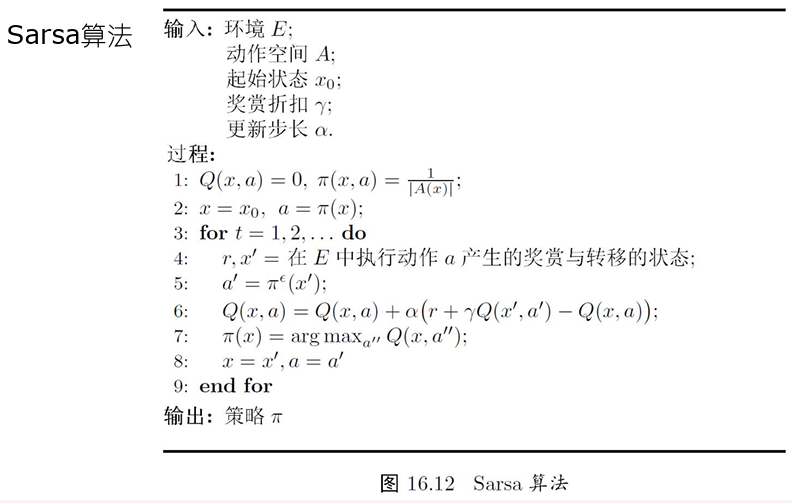
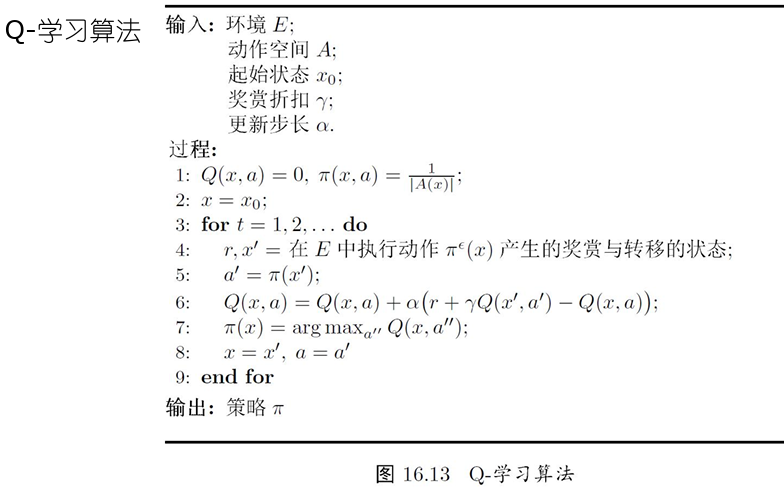
- 时序差分学习
- 情况
- 深度强化学习
- AlphaGo


12. 强化学习
http://binbo-zappy.github.io/2024/12/07/PR-ML/12-强化学习/